
During the past two decades, satellite navigation became revolutionary — with more than 5 billion enabled devices, Global Navigation Satellite Systems (GNSS) find utility in nearly all facets of modern life, from the source of time for communications networks to the source of safety-critical positioning in civil aviation.
Now, another revolution has appeared on the horizon, one that promises disruption of transportation, mobility, and safety. Autonomous systems in the form of self-driving cars, aerial platforms and mobile robotics are on rise, targeting improved access to the mobility of people, goods, and services.

This transformation is one whose complexity demands more than what today’s navigation systems can provide. Xona’s vision is one of a connected and autonomous future that leverages investment in new space infrastructure for navigation services that are robust, reliable, and secure.
To understand where navigation is headed, we turn to the past to understand its evolution. One hundred years ago, the state-of-the-art was celestial navigation used by mariners at sea. The Second World War brought new needs with an emerging aviation market and spawned the advent of ground-based radio navigation aids. The Cold War brought satellites to navigation that eventually lead to the familiar GPS (Global Positioning System) that became operational in the mid 1990s.
Looking at capability over time, this progress reveals a clear trend: within the last century, there has been an order of magnitude improvement in location accuracy every 30 years. Each step has required investment in new infrastructure to reach new capabilities. With meter-level positioning first widely available in the mid-1990s with GPS, this implies that the mid 2020s will demand decimeter, or better, performance.
Autonomous systems are one of many coming applications that drive this need. Localization is a foundational element of autonomous driving. Knowledge of precise vehicle location, coupled with highly detailed maps, add the context needed to drive with confidence.
To maintain an autonomous vehicle within its lane, highway operation requires knowledge of location at 50 cm, where local city roads require 30 cm1. The challenge facing auto makers is meeting the required level of reliability. Current targets place this at Automotive Safety Integrity Level (ASIL) D, which has been argued to represent one failure per billion miles of driving for subsystems like localization, a feat not yet demonstrated. Current Society of Automotive Engineers (SAE) Level 4 fully autonomous systems primarily rely on LiDAR for localization, but several technologies are emerging to meet this challenge including computer vision, radar, and GNSS.
Though some have shown progress in meeting these needs in certain circumstances or conditions, they all struggle to fully solve the problem to the level of reliability, safety, and security that will ultimately be needed. LiDAR and vision struggle in inclement weather due to absorption or scattering and is further hindered by occlusions. Radar, though more impervious to weather, is limited by sensor noise and resolution. LiDAR, vision, and radar approaches also require a data intensive localization map layer which must be maintained and updated frequently.
GNSS technologies have also seen substantial investment in the Advanced Driver Assistance System (ADAS) and autonomous driving domains. There is now continent-scale deployment of GNSS monitoring stations in service, delivering correction services via cellular.
The accuracy required for lane-determination to support future ADAS applications is nearing production where research systems are approaching that needed for full self-driving. Though GNSS accuracy is approaching the needs of autonomy, other risks remain with availability, interference, and cybersecurity.
RF interference is a growing threat on the road. Often motivated by privacy concerns, low-cost GNSS jammers are a popular means of disrupting fleet tracking. Between 2016 and 2018, more than 50,000 such disruptions were recorded on European roads alone.
The cybersecurity of GNSS is another emerging and perhaps even more menacing threat. Designed in the 1970s, civil GNSS signals are unencrypted and unauthenticated, leaving vulnerabilities that can be exploited with counterfeit (spoofed) signals.
Less than ten years ago, GNSS spoofing required specialized expertise and equipment that cost upwards of $50,000. Now, with open source software and more accessible hardware, spoofing attacks can be accomplished for as little as $100.
With increasing accessibility to spoofing technology has come a higher frequency of, and increased severity, of attacks. For example, at the 2019 Geneva Motor Show, several automotive manufactures including Audi, Peugeot, Renault, Rolls-Royce, Volkswagen, Daimler-Benz, and BMW reported their vehicles’ GNSS to be in Buckingham, England, in the year 2036, the result of a suspected widespread spoofing attack. Later in 2019, researchers at Regulus Cyber demonstrated this vulnerability in autonomy with a staged spoofing attack on a Tesla Model S and Model 3, creating unsafe behavior of the autopilot.
The challenge to be faced is how to achieve localization requirements on accuracy, availability, integrity, continuity, scalability, and security while maintaining reasonable Cost, Size, Weight, and Power (CSWaP). Furthermore, autonomous systems will interoperate in our cities, necessitating a common standard.
The safest maneuvers are informed with the most complete picture of the surroundings. This requires going beyond the line of sight of vehicle sensors and creating situational awareness at city levels. This demands an environment of collaborative data sharing through vehicle communication. Such a framework enables vehicles and infrastructure to act collectively, improving safety and reducing the risk of collision. Such data sharing is only effective if there is an agreed upon standard and datum with appropriate measures for data security.
Investment in infrastructure for the establishment of such a standardized system offers the potential for the most economical and lightweight navigation solution for the end user. Satellite navigation offers a ubiquitous reach with established global datums and thus is considered the logical choice for such a universal standard.
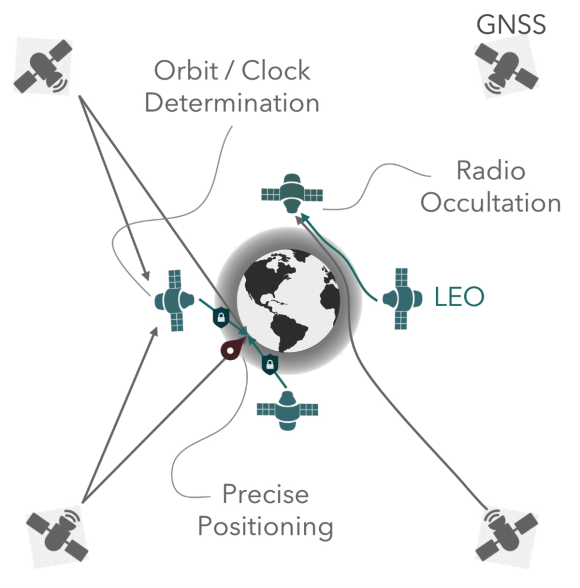
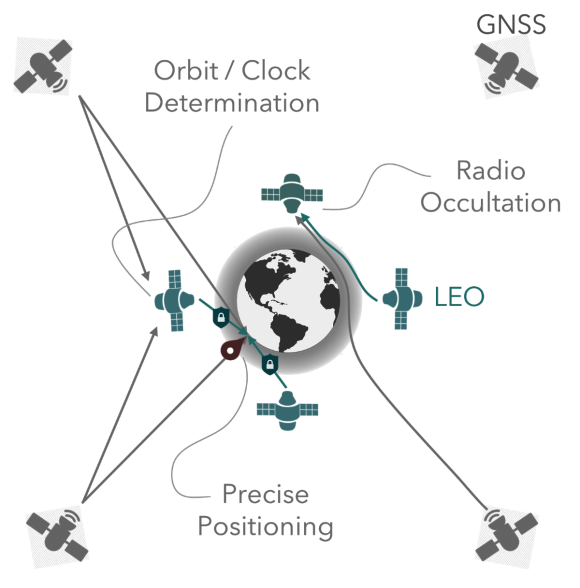
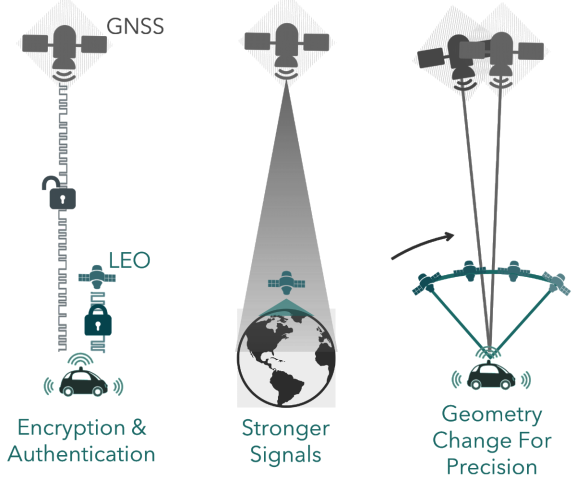
To meet these demands, Xona is building a navigation service to be delivered from Low Earth Orbiting (LEO) smallsats. Compared to GNSS in Medium Earth Orbit (MEO), such satellites will be located 20 to 40 times closer to Earth, having substantial implications for user performance and satellite payload cost. LEO satellites can provide robust position accuracy, in part through rapid estimation of carrier phase ambiguities via speedier motion across the sky. Proximity to Earth leads to stronger signals for the end user, giving better tracking performance and substantial resilience in the face of RF interference.
Lastly, such a signal is not bound by legacy systems and can be designed with modern encryption and data authentication for resistance to spoofing attack. Traditionally the domain of government organizations, building a commercial satellite navigation service is unprecedented. However, there is also revolution underway in the space sector. The new space movement challenges the traditional approach and has resulted in a tenfold reduction in the cost per kilogram to orbit in recent years.
Satellites and components have become commoditized and roll off assembly lines instead of being individually crafted for each mission. These ingredients create an ecosystem where Mega Constellations of thousands of satellites are being constructed by the likes of SpaceX, Telesat and Amazon to meet the global demand for broadband.
The GNSS satellites of today host kilowatt navigation payloads, which use space-rated atomic clocks to drive a half dozen signals toward Earth. These live in MEO in the outer Van Allen radiation belt, the harshest environment that Earth satellites operate in today.
Moving to LEO offers several opportunities. First, the tens of billions of dollars of GNSS infrastructure above in MEO can be leveraged. This gives access to a long-term frequency standard, where other clocks such as Oven Control Crystal Oscillators (OCXO) can be considered for the shorter term on satellites in LEO.
A GNSS receiver onboard the satellite has further implications for orbit determination, where sub-decimeter GNSS-based orbit determination has already been demonstrated in real-time. Complexity is further reduced by virtue of the operating environment, where LEO radiation levels are more amenable to Commercial-Of-The-Self (COTS) components of automotive or industrial grade. The trade-off is in the numbers, where it takes around 300 LEO satellites to match the coverage of the 30 or so GPS satellites in MEO today. These elements combine to create the conditions for a streamlined navigation payload which can be supported by several commodity satellite buses.
This model leverages the best of ‘traditional’ and ‘new’ space to combine and deliver new navigation signals with new capability to users on Earth and is another step on the road to safe autonomy.
www.xonaspace.com/
References
1T. G. R. Reid, S. E. Houts, R. Cammarata, G. Mills, S. Agarwal, A. Vora, G. Pandey., “Localization Requirements for Autonomous Vehicles,” SAE Int. J. Connect. Autom. Veh., vol. 2, no. 3, pp. 12-02-03–0012, Sep. 2019, doi: 10.4271/12-02-03-0012.

Dr. Tyler Reid is a co-founder and CTO of Xona Space Systems, a start-up focused on GNSS augmentation from LEO. Previously, Tyler worked as a Research Engineer with the Controls and Automated Systems team at Ford Motor Company, working in localization and mapping for self-driving cars. He also worked as a Software Engineer at Google’s Street View and a lecturer at Stanford University where co-taught the graduate course on GPS. Tyler received his Ph.D. (’17) and M.Sc. (’12) in Aeronautics and Astronautics from Stanford where he worked in the GPS Research Lab and his B.Eng. (’10) in Mechanical Engineering from McGill University.
Xona Space Systems is a California-based start-up whose sights are set on building the satellite navigation infrastructure needed to support intelligent transportation systems, such as self-driving cars.